


Nuevo sistema para mejorar la vigilancia automatizada
Investigadores de la ETSIT de la UPM han desarrollado un sistema que utiliza varias cámaras con vistas solapadas y estima de manera muy precisa la posición 3D y las características de los objetos observados, esencial en videovigilancia.
En la actualidad, la seguridad, especialmente la vigilancia de espacios públicos, y la monitorización de patrones de comportamiento se han convertido en una cuestión de gran interés para ciudadanos, gobiernos y empresas privadas. Aunque hay diferentes alternativas para su realización (sensores acústicos, de presión, etc.) y también existen sistemas multimodales de vigilancia, el campo más activo en cuanto a investigación es el de la videovigilancia, mediante el uso de cámaras de vídeo.
 En este contexto, el Grupo de Tratamiento de Imágenes de la ETSI Telecomunicación de la Universidad Politécnica de Madrid ha desarrollado un sistema que, utilizando varias cámaras con campos de visión solapados, estima de manera precisa la posición 3D y las características espaciales de los objetos observados. Además, el nuevo sistema incorpora unas características que evitan las limitaciones típicas de los sistemas multi-cámara (necesidad de plano de suelo visible, asunción de formas predefinidas, etc.).
En este contexto, el Grupo de Tratamiento de Imágenes de la ETSI Telecomunicación de la Universidad Politécnica de Madrid ha desarrollado un sistema que, utilizando varias cámaras con campos de visión solapados, estima de manera precisa la posición 3D y las características espaciales de los objetos observados. Además, el nuevo sistema incorpora unas características que evitan las limitaciones típicas de los sistemas multi-cámara (necesidad de plano de suelo visible, asunción de formas predefinidas, etc.).
Los sistemas automáticos de videovigilancia tienen, como parte esencial, sistemas de seguimiento de objetos de interés dirigido principalmente sobre humanos y vehículos, aunque no exclusivamente. El objetivo del seguimiento es la localización precisa de todos los objetos de la escena en todo instante de tiempo. Este conocimiento tiene gran importancia para la comprensión posterior de la escena monitorizada y para la interpretación de los comportamientos de los objetos presentes en ella.
El seguimiento de múltiples objetos mediante una única cámara resulta una tarea sumamente compleja en entornos reales, principalmente debido a que, con gran frecuencia, los objetos resultan parcial o completamente ocluidos. Por ello, cada vez es más habitual utilizar varias cámaras, posicionadas convenientemente, para permitir un seguimiento más robusto en situaciones de oclusión severa.
Habitualmente, las distintas vistas del sistema multi-cámara se combinan utilizando el plano de suelo. Sin embargo, esta opción, aunque efectiva en ciertas situaciones, no es posible en todos los casos ya que el suelo no resulta visible en ciertos entornos. También es común la asunción de formas predefinidas para los objetos de interés, lo que impide el seguimiento conjunto de objetos de muy distinta naturaleza, por ejemplo, humanos y vehículos, o cuya naturaleza se desconoce a priori.
El nuevo sistema desarrollado por el Grupo de Tratamiento de Imágenes de la UPM no asume ninguna forma predefinida para los objetos móviles, permitiendo el seguimiento no sólo de humanos sino de cualquier tipo de objeto de interés. Dicho sistema tampoco requiere que los objetos se muevan en un plano de suelo visible, posibilitando su funcionamiento en un amplio rango de situaciones. Por lo tanto, el método propuesto evita las limitaciones típicas de los sistemas multi-cámara.
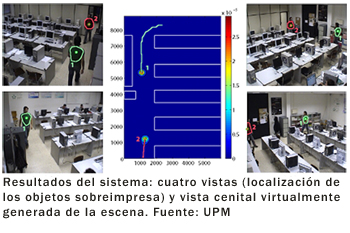
Para ello, el sistema desarrollado combina conceptos de estimación estadística no paramétrica y de geometría proyectiva. El resultado es el seguimiento robusto de múltiples objetos móviles en la escena, además de su precisa localización 3D, aumentando así las posibilidades de comprensión de la escena observada. Las pruebas realizadas sobre el sistema muestran su funcionamiento en gran variedad de situaciones, así como sus posibilidades en sistemas de vigilancia en entornos reales.
Esta línea de investigación del Grupo de Tratamiento de Imágenes ha sido financiada por diversos proyectos nacionales. El resultado de la aplicación de las técnicas descritas se puede ver en los siguientes vídeos: Vídeo1 y Vídeo2.
(*)LECTURE NOTES IN COMPUTER SCIENCE, VOL. 5259, PP. 785 795, 2008. "3D Tracking Using Multi-view Based Particle Filters". Advanced Concepts for Intelligent Vision Systems (ACIVS 2009). Mohedano, Raúl; García, Narciso; Salgado, Luis; Jaureguizar, Fernando.